

面向柔板制造的仿人灵巧操作技能学习
机械工程
资助企业:
 苏州东山精密制造股份有限公司
苏州东山精密制造股份有限公司
资助年份:
企业导师: 胡宗敏

指导教师: 盛鑫军、郭伟超
项目成员: 姜卓良、乐天、岳传祺
 项目海报
项目海报


 项目视频
项目简介
项目视频
项目简介
项目概述
面向柔性印刷电路板制造中抓取、放置等关键工序自动化不足与柔板轻薄易变形导致的人工操作效率低、一致性差等痛点,基于仿人双臂灵巧操作平台,构建面向FPC柔性操作的智能化解决方案。项目重点完成外骨骼数据采集系统的设计与制造、人工操作数据的高质量采集,进一步构建完整的数据采集、模型训练与部署流程,提升机器人在FPC柔顺抓取与放置任务中的操作精度、适应性与自动化水平。
项目目标
本项目面向柔性电路板精细化装配场景,旨在开发一套基于模仿学习的仿人双臂灵巧操作技能学习系统,实现从数据采集、模型训练到机器人自主操作的完整闭环。具体包括:
(1) 设计并制造与机械手运动学同构的外骨骼数据采集系统;
(2) 完成多模态示教数据采集、处理与可视化,构建适用于模型训练的数据集;
(3) 实现基于模仿学习的柔性电路板抓取操作,并结合双臂协同反馈控制完成放置与装配任务。
实现提升柔板操作的稳定性、准确性与安全性,降低损坏率。为柔性电子制造的自动化与智能化升级提供技术支撑与工程验证。
项目成果
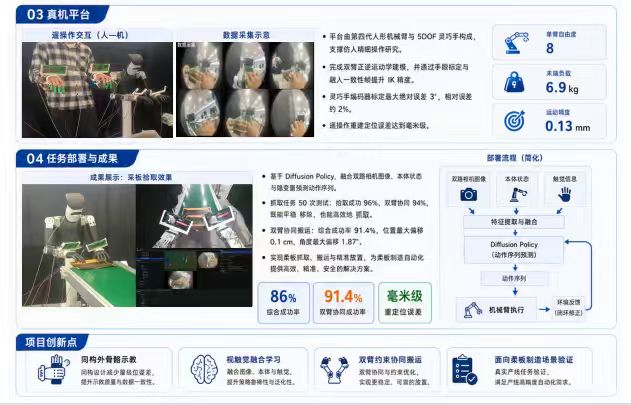
本项目构建了面向柔板精细化操作的仿人双臂灵巧操作技能学习系统,形成了从数据采集、模型训练到真机部署的完整技术闭环。项目完成了与真机灵巧手运动学同构的外骨骼数据采集系统设计制造,并结合可视化采集软件完成了高质量多模态示教数据采集。项目同时完成了真机平台IK 精度测量与误差补偿,提升真机平台部署精度。最终基于采集数据训练扩散模型,完成柔板抓取、搬运与放置任务的真机部署。实验结果显示,采集数据合格率达 90.5%,柔板拾取综合成功率达 86%,双臂协同搬运成功率达 91.4%,验证了方案在柔板自动化制造中的可行性。




