

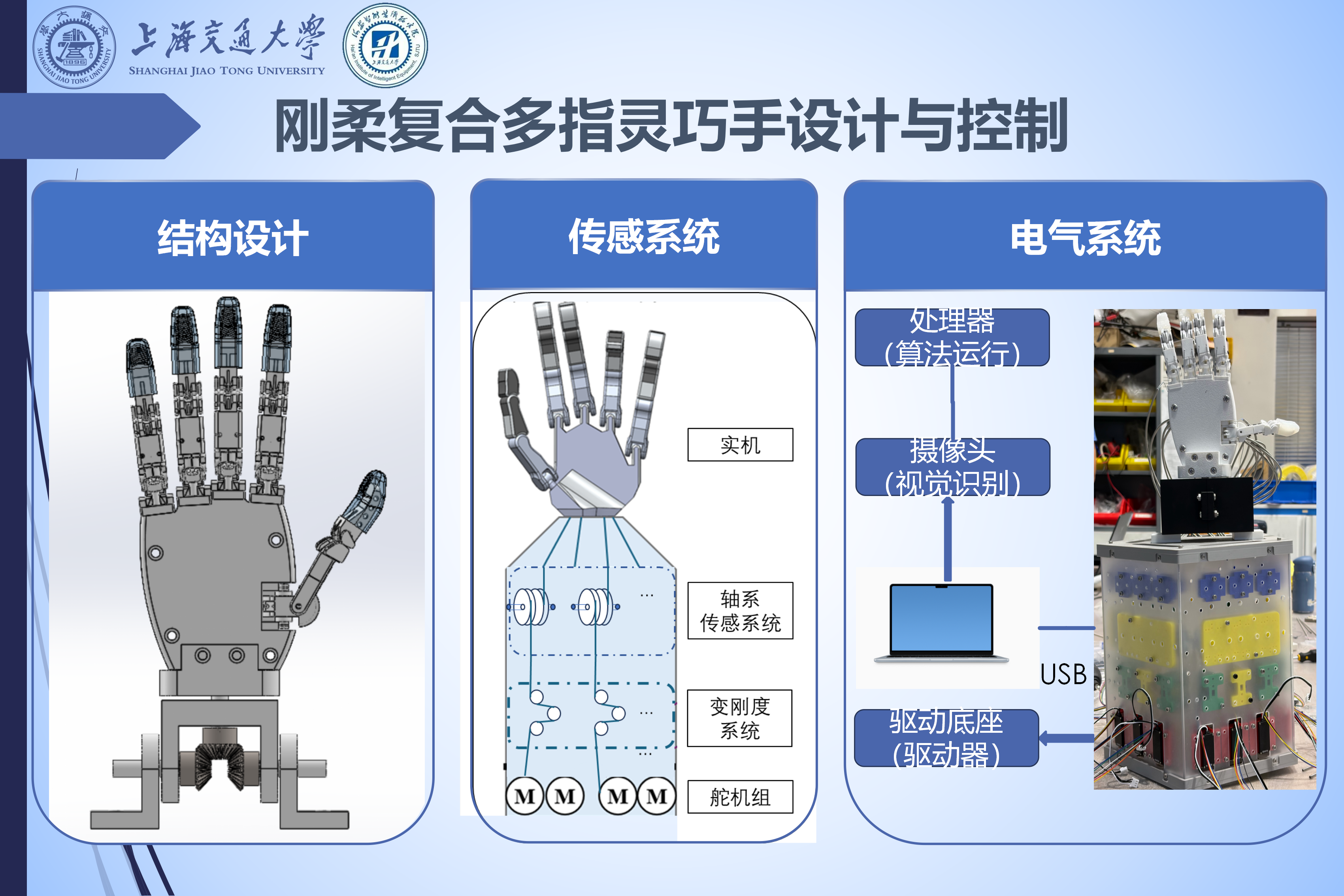
刚柔复合多指灵巧手设计与控制
机械工程
资助企业:
 海安365best体育亚洲官网智能装备研究院
海安365best体育亚洲官网智能装备研究院
资助年份:
企业导师: 杨立拥

指导教师: 陈飞飞
项目成员: 雷旭阳、徐冰玉、张阳
 项目海报
项目海报


 项目视频
项目简介
项目视频
项目简介
项目概述
随着机器人技术的持续发展,其应用场景逐渐扩展向非结构化的环境与复杂多变的任务,这对机器人末端执行器提出了更高要求。以仿人灵巧手为代表的多指灵巧手,是执行复杂、精细操作任务的关键部件。新兴的刚柔复合手通过结合刚体机构与软体结构构造灵巧手本体,有望融合两种技术的优势,最终获得复杂环境下的灵巧操作能力。本项目拟探索兼具主动运动灵巧性、被动顺应性与大负载能力的刚柔复合手技术方案,需满足以下三方面的要求。(1)灵巧运动能力:参考人手指的灵巧运动能力,各手指需实现类人的工作空间,能够实现不同物体的力抓握模式与精细抓握模式,同时需要具备对物体的手内旋转、平移操作能力。以满足非结构化环境下的灵巧操作需求。(2)被动顺应性与负载能力:需要在机械层面设计顺应性,一方面提供交互的安全性,另一方面提高其自适应能力。同时,需处理好顺应性与负载能力之间的矛盾,最终目标是提高抓握与操作能力。(3)抓握与操作能力:需建立包括灵巧手关节位姿、驱动力的传感系统,同时搭建稳定可靠的底层控制系统,实现各手指运动的精细控制。最终能够针对多种物体执行抓握、侧捏、手内平移与旋转等基础任务。
项目目标
(1)刚柔复合手运动-力学建模分析与仿真:完成刚柔复合手指的力学建模,能够分析单指的运动能力、刚度特性、力输出特性。对软体结构进行仿真,分析不同驱动与外载下的变形,用于指导设计。 进一步实现多指系统的性能分析,面向手内操作任务,实现指定姿势下的抓握稳定性、被动顺应性的分析。(2)灵巧手结构设计与传感系统集成:完成灵巧手本体的结构设计,借助力学分析模型迭代改进设计,面向手内灵巧操作,实现所需的运动灵巧性与被动顺应性,并保障一定的负载能力。实现灵巧手驱动系统的紧凑集成。结合各关节特点设计关节角传感方案,以获得多指手的位姿状态,并完成传感器的硬件集成。(3)电气系统集成与底层运动控制器设计:针对驱动电机、各类传感器的不同需求,搭建电气系统,完成传感信号的处理,并实现基础的供电、通信与控制功能。基于运动学模型与传感反馈,设计底层运动控制器,进行手内平移、旋转、抓握、侧捏等基础任务的功能验证。最后,面向手内操作任务开展应用验证。
项目成果
本项目圆满完成刚柔复合多指灵巧手的设计、建模、传感与控制全流程研发。建立了PIP、MCP关节运动学与静力学模型,完成单指刚度、变形仿真及多指协作仿真,验证了运动与力学性能。完成15自由度五指本体结构设计,集成多层柔性元件与腱绳驱动系统,实现紧凑化、轻量化集成。设计并实现基于磁编码器的多通道绳驱传感方案,完成硬件集成与视觉标定,实现关节姿态高精度反馈。搭建完整电气系统,开发分层运动控制器,融合视觉遥操作与示教学习策略,实现精准运动控制。实物验证表明,灵巧兼具类人工作空间、良好被动顺应性与稳定负载能力,可稳定完成抓握等任务,圆满达成预设目标。




