

复杂深腔作业软体机器人设计与控制
机械工程
资助企业:
 海安365best体育亚洲官网智能装备研究院
海安365best体育亚洲官网智能装备研究院
资助年份:
企业导师: 杨立拥

指导教师: 陈飞飞
项目成员: 陈曦祎 袁智维 应承晓
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
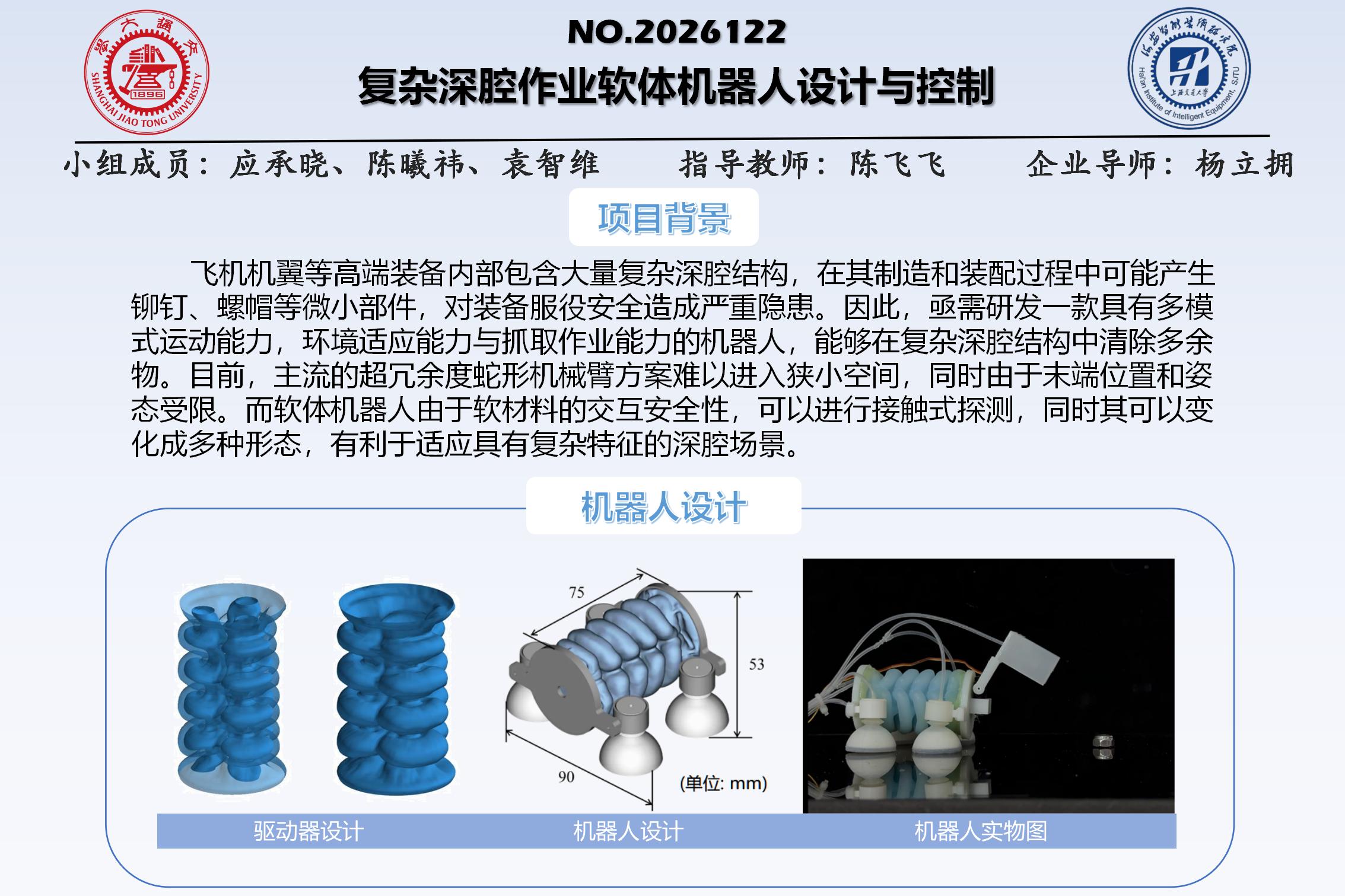
本项目面向飞机机翼等高端装备内部复杂深腔结构中多余物(如铆钉、螺帽)的检测与清除需求,旨在研制一款具备多模式运动能力的软体机器人。该机器人采用气动驱动方式,通过充气实现可控变形,并集成吸盘以实现壁面附着与爬行功能。机器人末端配备一款全柔性抓手,用于抓取并回收多余物。此外,机器人具备基于本体感知反馈的闭环运动控制能力。本项目能够解决蛇形机械臂在深腔环境中运动受限、操作能力不足的问题,并推动软体机器人在深腔作业环境中的工程应用。
项目目标
本项目旨在研发一款具有多模式运动能力的软体机器人,主要目标包括:
1、研发一款适用于狭窄深腔环境的柔顺软体抓手,完成抓手的结构设计、材料选型与抓取性能实验验证,使其能够稳定抓取螺钉、螺帽等典型多余物。
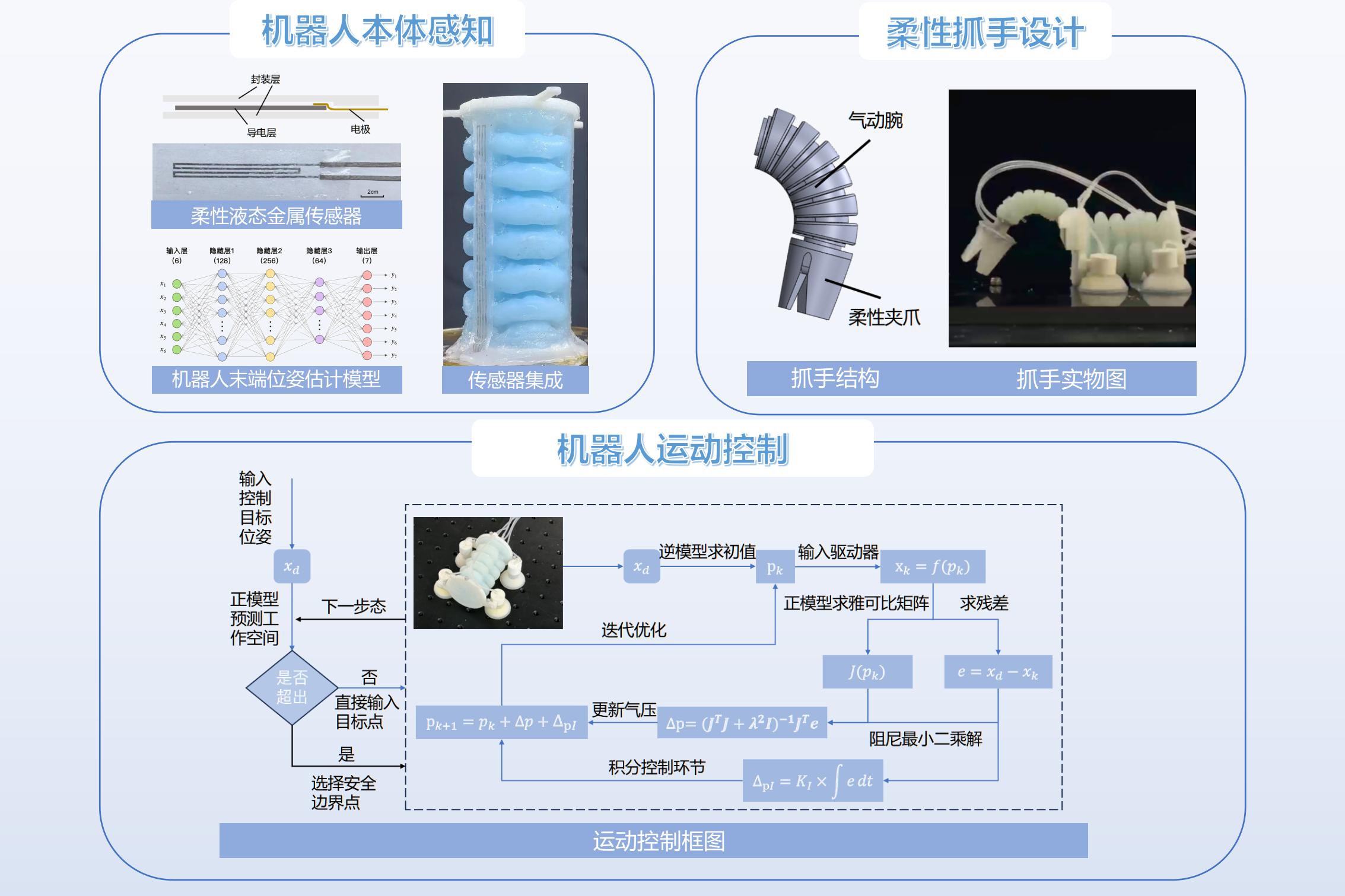
2、设计一款柔性应变传感器并与驱动器集成,建立驱动输入—形变输出—感知信号之间的关联规律,从而通过传感器信号实现变形感知及末端位姿估计。
3、分析软体驱动器的力学特性,建立机器人的数据驱动模型。并基于本体感知提供的状态反馈构建多模式闭环运动控制框架。
项目成果
本项目研制了一款具有多模式运动与柔顺抓取能力的深腔作业软体机器人系统,主要成果包括:
1、抓手设计方面,设计并制作一款全柔性抓手,其能够安装在机器人末端,实现对多余物的稳定抓取。
2、本体感知方面,通过在驱动器表面集成柔性应变传感器,实现对驱动器变形状态与末端位姿的估计,为运动控制提供状态反馈。
3、建模控制方面,建立机器人的正逆运动学模型,并结合本体感知实现机器人的闭环运动控制。




