

集装箱拆锁机双机器人运动控制设计与仿真研究
机械工程
资助企业:
 上海振华重工(集团)股份有限公司
上海振华重工(集团)股份有限公司
资助年份: 2026
企业导师: 程向阳

指导教师: 李彦明
项目成员: 刘斯宇、郝欣康
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
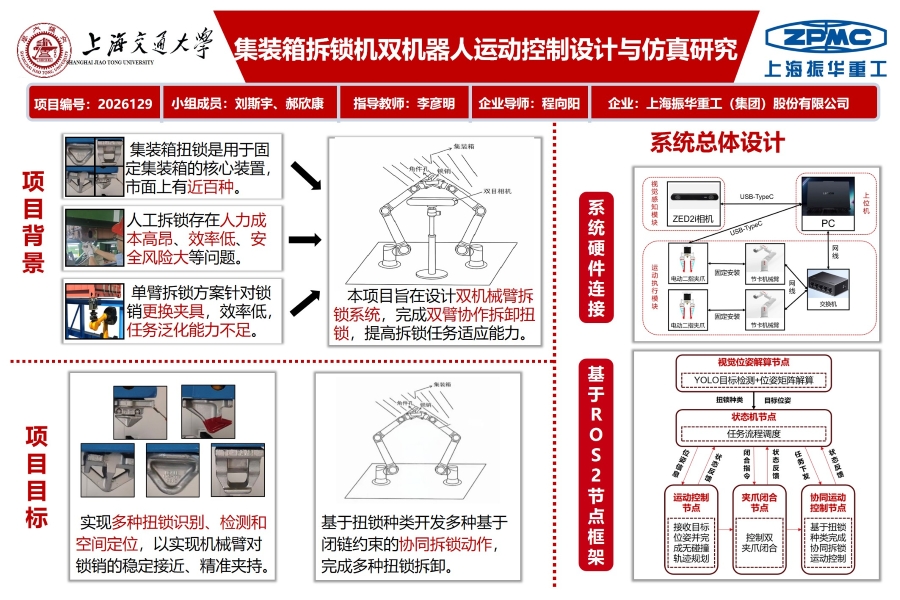
当前,港口自动化已成趋势,而集装箱拆锁是推进港口自动化的重要环节。本项目针对港口集装箱扭锁拆卸作业中人工劳动强度大、安全风险高,单机械臂方案柔性不足等问题,提出了一套双机械臂协同拆锁系统,以提升拆锁作业任务适应能力。本项目以两台装有二指柔性夹爪的六轴机械臂为核心执行机构,配合ZED 2i深度相机和上位机搭建系统平台,开发“视觉感知—位姿解算—运动规划—夹爪抓取—协同拆锁”的完整拆锁工作流程,实现对扭锁的识别定位、稳定夹持与双臂协同拆卸。
项目目标
项目总体目标是开发面向集装箱扭锁的双机械臂协同拆锁系统,实现扭锁识别定位、机械臂稳定夹持和双臂协同拆卸。
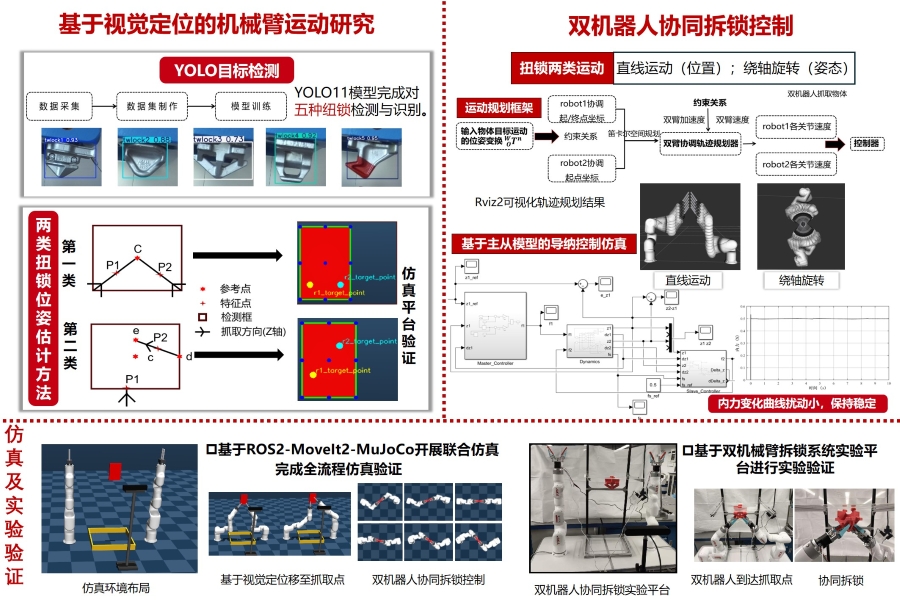
1)构建面向五种集装箱扭锁的视觉检测与定位方法,完成扭锁类别识别、空间位置求解和抓取位姿估计,为双机械臂运动控制提供目标输入。
2)开发面向扭锁拆卸任务的双机器人协同动作,建立闭链约束关系,完成夹持、旋转和拔出等拆锁动作规划。
3)搭建双机械臂拆锁系统,进行双机械臂拆锁实验验证。
项目成果
(1)项目能够对五种典型集装箱扭锁进行检测和抓取位姿解算;(2)项目基于ROS2与MoveIt2进行双机械臂运动规划与控制,开发了面向不同扭锁拆卸需求的双臂协同动作,完成直线移动、绕轴旋转及协同拔出等拆锁过程的规划;(3)项目基于MuJoCo完成了全流程仿真验证;(4)最终搭建了由深度相机、双机械臂、二指夹爪和扭锁模型组成的实验平台,在完成系统标定、软件节点联调之后,通过对一种扭锁进行双机械臂拆锁实验,验证了所提方案的整体可行性。




